Frequently Asked Questions about Frameless Resolvers
What are the types of resolver?
Resolvers differ by 2 major attributes: housing design and winding configurations. Resolvers can be housed within a body or frameless in design. Resolvers come in various winding configurations with the number of speeds or poles and input excitation differing based on the winding design.
Learn more resolver technology here
What is a frameless resolver?
Unlike a housed resolver, in a frameless resolver the stator and rotor are not contained within a single housing. A frameless resolver can be mounted directly to the shaft of the motor or rotating load because it is in two separate parts allow for more flexible mounting options and potential reduction in overall space, when compared to the use of couplings or tethers.
How to mount a frameless resolver?
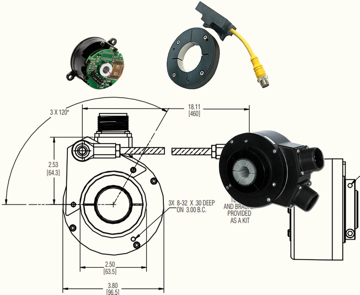
When mounting a frameless resolver, the rotor and stator must be properly aligned to achieve electromagnetic interaction, essential to accurate position reporting. Mount the rotor using an industrial grade glue. Alternatively, a jamnut can be used to hold the rotor in place. Mount the stator with either an o-ring or servo clips for the servo-style stator housings or mounting screws for the flanged-type housings.
Learn more how to mount and install resolvers here
What is the difference between a resolver and an encoder?
A resolver provides an analog signal typically consisting of sin & cos output signals for position measurement. An encoder (depending on type) provides digital pulses or a digital word to represent the position measurement. While a resolver is often less expensive than an encoder, the analog output requires additional electronics on the receiving side to digitalize the signal.